 平台热线
平台热线



Fanuc机器人控制柜启动模式介绍
声明:本媒体部分图片、文章来源于网络,
版权归原作者所有,如有侵权,请与我联系删除。
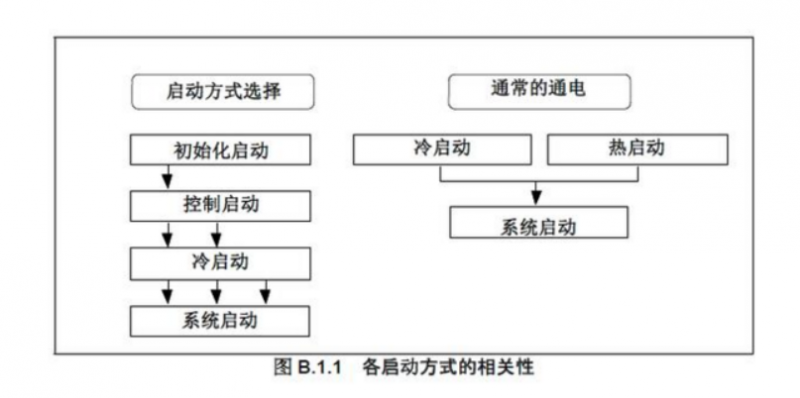
发那科机器人控制装置有4种启动方式(启动模式)。
1. 初始化启动:当初始化启动执行时,所有程序将被删除,所有设置将返回标准值。初始化完成后,自动执行控制开始。
2. 控件启动:当执行控件启动时,简单的控件启动系统菜单启动。虽然不能通过控制启动来操作机器人,但是可以通过改变系统变量、读取系统文件、设置机器人等方式来操作,这些都是不能正常改变的。可以从控制启动菜单的辅助菜单执行冷启动。
3.冷启动:冷启动是在停电处理无效时进行常规开机操作的一种启动方式。程序的执行状态变为“结束”状态,所有输出信号断开连接。冷启动完成后,即可进行机器人的操作。
即使停电有效,也可以在通电状态下进行冷启动。
4. 热启动:热启动是在停电处理有效时进行常规开机操作的一种启动方式。程序执行状态和输出模式,保持断电启动状态。当热启动完成后,就可以进行机器人的操作了。
对于日常工作,使用冷或热启动。使用哪一种取决于断电的有效性/非有效性。
启动和控制启动,以便在维护期间使用。这些启动方法在日常操作中不使用。
了解更多发那科机器人咨询点击:发那科机器人
